
目录
维护工程师老张蹲在机器旁边,对着一坨意大利面条似的代码发愁——轴控制逻辑和点胶工艺流程搅在一块儿,改一行代码崩三个功能。这种场景,做过工控开发的朋友估计都经历过吧?
说个扎心的数据:我统计过公司内部的工控项目,代码混乱导致的维护成本,平均占整个项目周期的47%。将近一半的时间,都在"擦屁股"。
今天这篇文章,咱们就聊聊工控软件开发中一个老生常谈、却总被忽视的问题——控制层与业务层的分离。别急着划走,这次我准备了完整的WinForms实战案例,代码拿走就能跑。
🤔 问题到底出在哪儿?
混沌的起源
刚入行那会儿,我也喜欢把所有逻辑写在一个类里。按钮点击事件里直接操作电机、读取传感器、判断工艺条件、更新界面……一个方法写个三五百行,那叫一个"充实"。
后来项目交接的时候,接手的同事看了代码,沉默了足足三分钟。
问题的本质是什么?
举个生活中的例子。你去餐厅吃饭,厨师负责怎么炒菜(火候、调料、翻炒手法),而菜谱决定炒什么菜(食材组合、出餐顺序)。如果让厨师一边研究菜谱一边炒菜,要么菜糊了,要么上错桌。
回到点胶机场景:
| 层次 | 职责 | 具体内容 |
|---|---|---|
| 控制层 | 怎么动 | 轴移动、IO控制、安全互锁 |
| 业务层 | 动哪里 | 点胶路径、工艺参数、流程编排 |
这俩东西一旦搅和在一起,改工艺参数可能影响运动控制,调整轴速度又可能破坏业务流程。牵一发而动全身,说的就是这种代码。
常见的三个误区
误区一:"我的项目小,不需要分层"
小项目更需要!因为小项目往往会"长大"。等代码量上去了再重构,那滋味……谁试谁知道。
误区二:"分层会增加代码量"
确实会多写一些接口和类。但维护成本的降低,远超过这点额外工作量。我做过对比,分层架构的项目,后期需求变更的响应速度能快3-5倍。
误区三:"工控项目特殊,不适合常规架构"
恰恰相反。工控项目的硬件依赖性强,更需要通过分层来隔离变化。换个运动控制卡,只改控制层;换个点胶工艺,只改业务层。
🎯 架构设计:三层分明的世界
先看整体架构图,建立个宏观印象:
| 层级 | 名称 (中文) | 说明 |
|---|---|---|
| UI 层 (WinForms) | FrmMain - 用户交互界面 | 触发调用(调用业务层) |
| 业务层 (Business) | DispensingProcess - 点胶工艺流程编排 | 决定“动哪里”;被 UI 层调用,调用控制层 |
| 控制层 (Controllers) | MotionController - 运动控制协调 IoManager - IO信号管理 | 负责“怎么动”;被业务层调用 |
如果你要我输出为 Markdown 渲染的图形(例如带有箭头的 ASCII 或用 mermaid 图),我也可以再生成。需要哪种格式?
核心设计原则
原则一:单向依赖
上层可以调用下层,下层绝不能反向调用上层。业务层使用控制层的接口,但控制层压根不知道业务层的存在。
原则二:接口隔离
控制层只暴露原子操作——移动到指定位置、打开阀门、读取传感器。怎么组合这些操作,那是业务层的事儿。
原则三:事件通知
下层状态变化了怎么办?控制层触发AlarmOccurred事件,业务层和UI层订阅处理,各管各的。
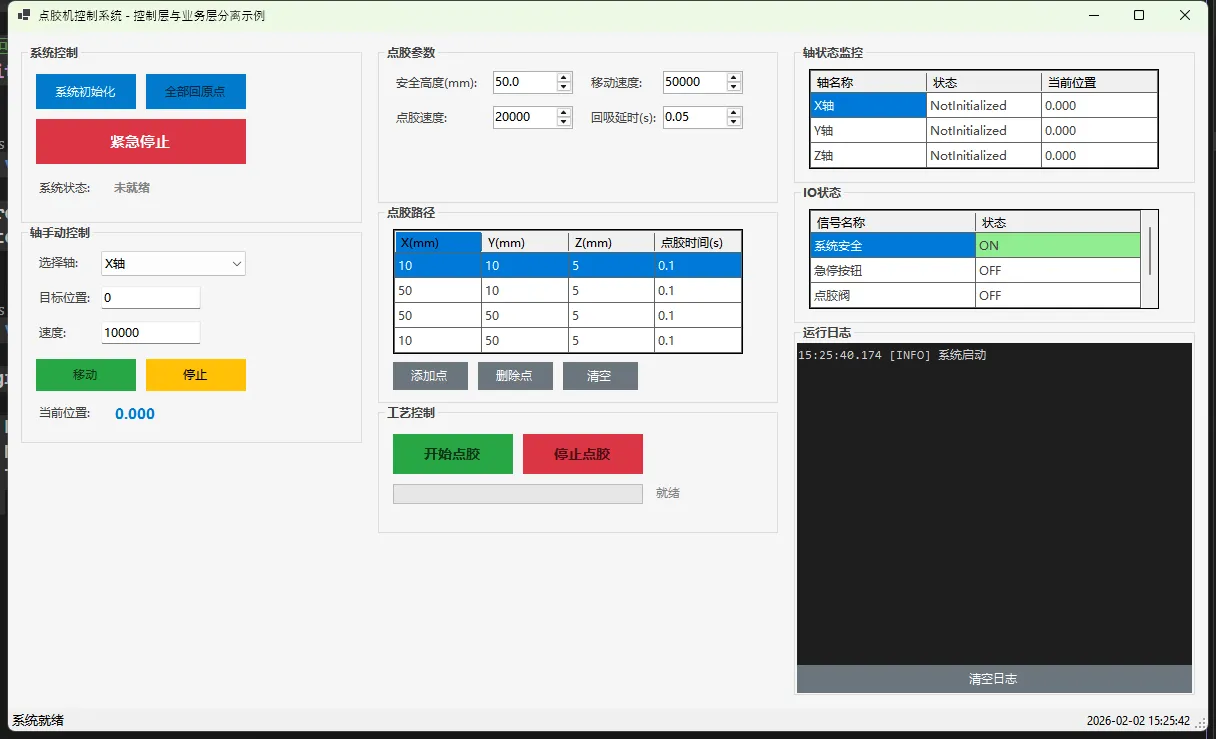
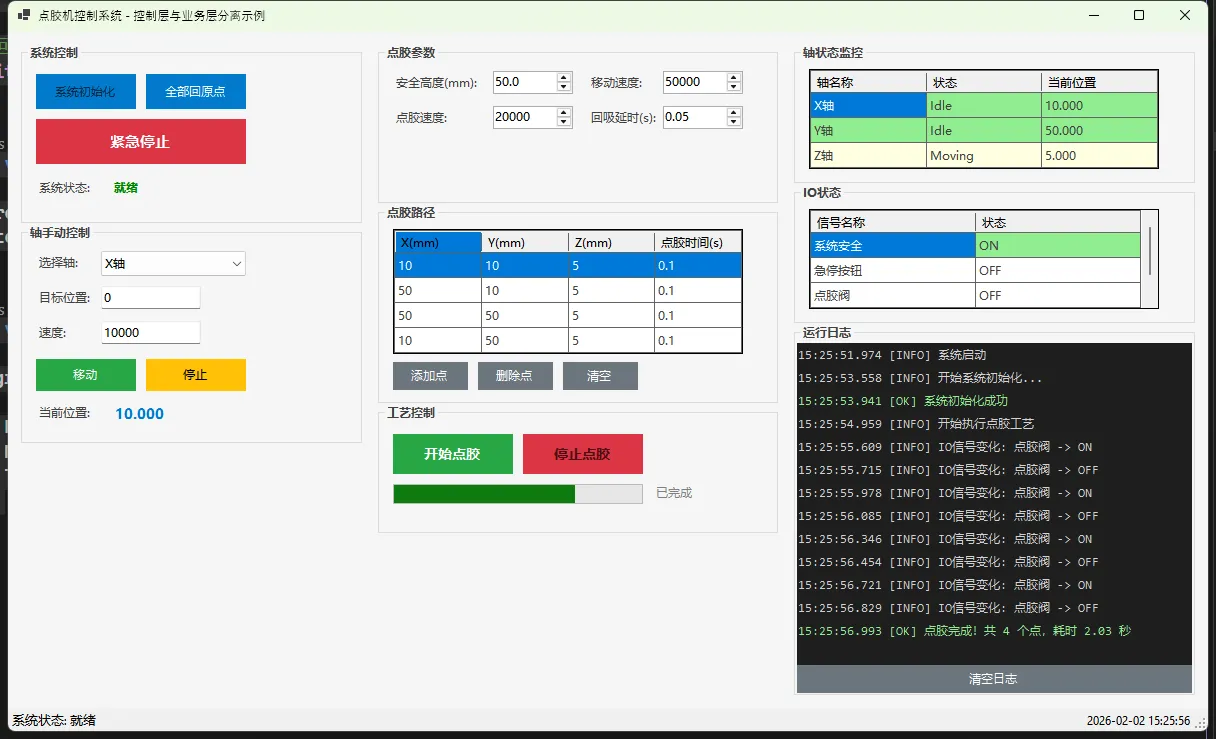
运行效果
🔧 控制层实现:打造坚实的地基
控制层是整个系统的根基。这一层出问题,上面全得塌。
运动轴接口设计
先定义接口,这是关键:
csharpusing AppDispensingControl.Models;
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace AppDispensingControl.Controllers
{
/// <summary>
/// 轴状态变更事件参数
/// </summary>
public class AxisStateChangedEventArgs : EventArgs
{
public int AxisIndex { get; set; }
public AxisState OldState { get; set; }
public AxisState NewState { get; set; }
}
/// <summary>
/// 运动结果
/// </summary>
public class MotionResult
{
public bool Success { get; set; }
public string ErrorMessage { get; set; } = string.Empty;
public static MotionResult Ok() => new MotionResult { Success = true };
public static MotionResult Fail(string msg) => new MotionResult { Success = false, ErrorMessage = msg };
}
/// <summary>
/// 运动轴接口
/// </summary>
public interface IMotionAxis
{
int AxisIndex { get; }
string AxisName { get; }
AxisState CurrentState { get; }
double CurrentPosition { get; }
event EventHandler<AxisStateChangedEventArgs> StateChanged;
Task<bool> InitializeAsync(AxisConfig config);
Task<MotionResult> HomeAsync(HomeConfig config);
Task<MotionResult> MoveAbsoluteAsync(double position, double velocity);
Task<MotionResult> MoveRelativeAsync(double distance, double velocity);
Task<MotionResult> StopAsync(StopMode mode);
}
}
为啥要定义接口?两个原因:
- 可测试:开发阶段用模拟轴,上机调试换真实轴,业务代码一行不改
- 可扩展:今天用雷赛卡,明天换固高卡,只要实现同一接口
运动控制器:协调多轴的指挥官
csharp/// <summary>
/// 运动控制器 - 控制层核心类
/// 负责协调多轴运动、安全互锁、状态管理
/// </summary>
public class MotionController
{
private readonly Dictionary<string, IMotionAxis> _axes = new();
private readonly IoManager _ioManager;
public MotionControllerState State { get; private set; } = MotionControllerState.NotReady;
public event EventHandler<AlarmEventArgs> AlarmOccurred;
public event EventHandler<MotionControllerState> StateChanged;
/// <summary>
/// 多轴联动移动 - 控制层提供的原子操作
/// </summary>
public async Task<bool> MoveMultipleAxesAsync(
Dictionary<string, double> targetPositions,
double velocity)
{
// 第一步:安全检查(这是控制层必须做的事)
if (!CheckSafetyCondition())
{
return false;
}
SetState(MotionControllerState.Moving);
// 第二步:并行执行多轴运动
var moveTasks = targetPositions
.Where(kvp => _axes.ContainsKey(kvp.Key))
.Select(kvp => _axes[kvp.Key].MoveAbsoluteAsync(kvp.Value, velocity))
.ToArray();
var results = await Task.WhenAll(moveTasks);
// 第三步:统一处理结果
if (results.All(r => r.Success))
{
SetState(MotionControllerState.Ready);
return true;
}
else
{
SetState(MotionControllerState.Error);
return false;
}
}
/// <summary>
/// 安全条件检查 - 控制层的核心职责
/// </summary>
private bool CheckSafetyCondition()
{
// 检查安全信号
if (!_ioManager.GetSignal("系统安全"))
{
RaiseAlarm(AlarmLevel.Warning, "安全条件不满足");
return false;
}
// 检查轴状态
if (_axes.Values.Any(a => a.CurrentState == AxisState.Error))
{
RaiseAlarm(AlarmLevel.Error, "存在异常轴");
return false;
}
return true;
}
}
注意看:MoveMultipleAxesAsync方法只关心"怎么移动"——检查安全、执行运动、返回结果。至于为什么要移动到这个位置?它不管,那是业务层的事。
💼 业务层实现:编排工艺流程
业务层的职责是组合控制层的原子操作,形成完整的工艺流程。
点胶工艺执行器
csharpusing AppDispensingControl.Controllers;
using AppDispensingControl.Models;
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace AppDispensingControl.Business
{
/// <summary>
/// 工艺进度事件参数
/// </summary>
public class ProcessProgressEventArgs : EventArgs
{
public int Percentage { get; set; }
public string Message { get; set; }
public DateTime Timestamp { get; set; }
}
/// <summary>
/// 点胶工艺执行器 - 业务层
/// </summary>
public class DispensingProcess
{
private readonly MotionController _motionController;
private readonly IoManager _ioManager;
private CancellationTokenSource _cts;
public ProcessState CurrentState { get; private set; }
public event EventHandler<ProcessProgressEventArgs> ProgressChanged;
public event EventHandler<ProcessState> StateChanged;
public DispensingProcess(MotionController motionController, IoManager ioManager)
{
_motionController = motionController;
_ioManager = ioManager;
}
public async Task<ProcessResult> ExecutePathAsync(DispensingPath path, DispensingParam param)
{
_cts = new CancellationTokenSource();
SetState(ProcessState.Running);
var result = new ProcessResult { StartTime = DateTime.Now };
try
{
ReportProgress(0, "开始执行点胶路径");
if (path.Points.Count == 0)
{
return ProcessResult.Fail("点胶路径为空");
}
// 1. 移动到起始位置
ReportProgress(5, "移动到起始位置");
var startPos = path.Points.First();
if (!await _motionController.MoveMultipleAxesAsync(
new Dictionary<string, double>
{
["X轴"] = startPos.X,
["Y轴"] = startPos.Y,
["Z轴"] = param.SafeHeight
}, param.MoveVelocity))
{
return ProcessResult.Fail("移动到起始位置失败");
}
_cts.Token.ThrowIfCancellationRequested();
// 2. Z轴下降到点胶高度
ReportProgress(8, "Z轴下降到点胶高度");
if (!await _motionController.MoveMultipleAxesAsync(
new Dictionary<string, double> { ["Z轴"] = startPos.Z }, param.DescendVelocity))
{
return ProcessResult.Fail("Z轴下降失败");
}
// 3. 依次执行各个点胶点
for (int i = 0; i < path.Points.Count; i++)
{
_cts.Token.ThrowIfCancellationRequested();
var point = path.Points[i];
var progress = 10 + (int)(80.0 * i / path.Points.Count);
ReportProgress(progress, $"点胶点 {i + 1}/{path.Points.Count}");
// 移动到点位
if (!await _motionController.MoveMultipleAxesAsync(
new Dictionary<string, double>
{
["X轴"] = point.X,
["Y轴"] = point.Y,
["Z轴"] = point.Z
}, param.DispensingVelocity))
{
return ProcessResult.Fail($"移动到点位{i + 1}失败");
}
// 执行点胶动作
await ExecuteDispensingAction(point.DispensingTime, param, _cts.Token);
}
// 4. 抬起Z轴
ReportProgress(95, "抬起Z轴");
if (!await _motionController.MoveMultipleAxesAsync(
new Dictionary<string, double> { ["Z轴"] = param.SafeHeight }, param.MoveVelocity))
{
return ProcessResult.Fail("Z轴抬起失败");
}
ReportProgress(100, "点胶完成");
result.EndTime = DateTime.Now;
result.Success = true;
result.TotalPoints = path.Points.Count;
SetState(ProcessState.Completed);
return result;
}
catch (OperationCanceledException)
{
SetState(ProcessState.Idle);
return ProcessResult.Fail("用户取消操作");
}
catch (Exception ex)
{
SetState(ProcessState.Error);
return ProcessResult.Fail($"点胶过程异常:{ex.Message}");
}
}
public void Stop()
{
_cts?.Cancel();
}
private async Task ExecuteDispensingAction(double dispensingTime, DispensingParam param, CancellationToken token)
{
// 打开点胶阀
_ioManager.SetSignal("点胶阀", true);
// 等待点胶时间
await Task.Delay((int)(dispensingTime * 1000), token);
// 关闭点胶阀
_ioManager.SetSignal("点胶阀", false);
// 回吸延时
await Task.Delay((int)(param.SuckBackDelay * 1000), token);
}
private void SetState(ProcessState state)
{
CurrentState = state;
StateChanged?.Invoke(this, state);
}
private void ReportProgress(int percentage, string message)
{
ProgressChanged?.Invoke(this, new ProcessProgressEventArgs
{
Percentage = percentage,
Message = message,
Timestamp = DateTime.Now
});
}
}
}
核心要点:
业务层定义的是"点胶路径"这个工艺概念——先到起点、下降、依次点胶、抬起。每一步具体怎么执行?交给控制层的MoveMultipleAxesAsync。
这样分工之后,如果客户说"点胶顺序要改成蛇形走位",只改业务层;如果硬件工程师说"轴加速度要调一下",只改控制层。互不干扰。
🖥️ UI层实现:让代码动起来
有了扎实的控制层和清晰的业务层,UI层就变得很薄了——主要负责展示状态和接收用户输入。
核心交互逻辑
csharppublic partial class FrmMain : Form
{
private readonly IoManager _ioManager;
private readonly MotionController _motionController;
private readonly DispensingProcess _dispensingProcess;
public FrmMain()
{
InitializeComponent();
// 初始化控制层
_ioManager = new IoManager();
_motionController = new MotionController(_ioManager);
// 注册轴(这里用模拟轴,实际项目换成真实轴实现)
_motionController.RegisterAxis("X轴", new MockMotionAxis(0, "X轴"));
_motionController.RegisterAxis("Y轴", new MockMotionAxis(1, "Y轴"));
_motionController.RegisterAxis("Z轴", new MockMotionAxis(2, "Z轴"));
// 初始化业务层
_dispensingProcess = new DispensingProcess(_motionController, _ioManager);
BindEvents();
}
/// <summary>
/// 开始点胶按钮 - UI层只负责收集参数和调用业务层
/// </summary>
private async void BtnStartProcess_Click(object sender, EventArgs e)
{
// 收集工艺参数(UI层职责)
var param = new DispensingParam
{
SafeHeight = (double)nudSafeHeight.Value,
MoveVelocity = (double)nudMoveVelocity.Value,
DispensingVelocity = (double)nudDispensingVelocity.Value,
SuckBackDelay = (double)nudSuckBackDelay.Value
};
// 调用业务层执行(一行代码搞定)
var result = await _dispensingProcess.ExecutePathAsync(path, param);
// 展示结果(UI层职责)
if (result.Success)
{
LogMessage($"点胶完成!共 {result.TotalPoints} 个点", LogLevel.Success);
}
else
{
LogMessage($"点胶失败:{result.Message}", LogLevel.Error);
}
}
}
看到没? UI层的代码干净利落。按钮点击→收集参数→调用业务层→显示结果。完事儿。
我在三个不同的项目里直接复用了。点胶机、贴片机、焊接机,底层运动控制的逻辑是通用的。
⚠️ 踩坑预警:这些地方容易翻车
坑一:控制层泄露业务逻辑
错误示例:
csharp// ❌ 在控制层判断业务条件
public async Task<bool> MoveToDispensingPoint(DispensingPoint point)
{
if (point.DispensingTime < 0.05) // 业务判断不该出现在这里!
{
return false;
}
// ...
}
正确做法是把业务判断放在业务层,控制层只管执行。
坑二:事件处理导致死锁
控制层触发事件,UI层在事件处理里又调用控制层方法,等待返回……死锁!
解决方案:使用BeginInvoke异步更新UI:
csharpprivate void MotionController_StateChanged(object sender, MotionControllerState e)
{
// ✅ 使用BeginInvoke避免死锁
this.BeginInvoke(() =>
{
lblSystemStateValue.Text = GetStateText(e);
});
}
坑三:忘记处理取消操作
长时间运行的工艺流程,必须支持取消。忘了加CancellationToken检查,用户点停止按钮没反应,只能干瞪眼。
💎 三句话总结
- 控制层管"怎么动":提供原子操作,不问为什么
- 业务层管"动哪里":编排流程,组合原子操作
- UI层管"看和点":展示状态,收集输入,不搞逻辑
🚀 进阶学习路线
掌握了分层架构,接下来可以继续深入:
分层架构基础 ↓ 依赖注入(IoC) ↓ 单元测试与Mock ↓ 领域驱动设计(DDD) ↓ 微服务架构(分布式工控系统)
💬 互动时间
几个问题想听听大家的想法:
- 你们项目里控制层和业务层是怎么划分的?有没有遇到过边界模糊的情况?
- 用模拟轴做开发测试,你们有什么好的实践经验?
评论区聊聊。如果这篇文章对你有帮助,点个在看,转发给团队里还在写意大利面条代码的同事——救人一命,胜造七级浮屠嘛。
代码模板已整理好,后台回复"点胶机架构"获取完整工程源码。
#C#开发 #工控软件 #架构设计 #WinForms #运动控制
相关信息
通过网盘分享的文件:AppDispensingControl.zip 链接: https://pan.baidu.com/s/19dItkAN6pVja7tBi3M-haw?pwd=7pft 提取码: 7pft --来自百度网盘超级会员v9的分享
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!