目录
Canny边缘检测是一种广泛使用的图像处理技术,它能够有效地提取图像中的边缘信息,从而在许多计算机视觉任务中发挥重要作用。在本文中,我们将探讨Canny边缘检测的原理、特点、应用场景,并提供使用OpenCvSharp进行Canny边缘检测的代码示例。
Canny 边缘检测原理
Canny 边缘检测算法由John F. Canny在1986年开发,是一种多级边缘检测算法。该算法主要分为以下几个步骤:
- 噪声去除:使用高斯滤波器平滑图像以去除噪声。
- 梯度计算:计算图像梯度的幅值和方向。通常使用Sobel算子。
- 非极大值抑制:消除不是边缘的像素点,仅保留潜在的边缘。
- 双阈值检测:应用两个不同的阈值来检测强边缘和弱边缘。
- 边缘连接:通过边缘连接将弱边缘连接到强边缘。
该算法保证了检测到的边缘有较好的连续性,同时对噪声保持一定的鲁棒性。
特点
- 定位准确:Canny检测可以准确地在位置上检测到真实的边缘。
- 多级检测:通过双阈值可以区分图像中的强边缘与弱边缘,加强边缘保持能力。
- 对噪声鲁棒:先进行高斯滤波处理,有效减少图像中的噪声影响。
应用场景
Canny边缘检测广泛应用于以下场景:
- 边缘提取与形状识别:在图像中提取轮廓用于目标识别和形状描述。
- 图像分割:作为图像分割的预处理步骤,以识别和分割区域。
- 运动检测:在视频序列中检测运动物体的边缘。
- 计算机视觉任务:如特征检测、物体检测等。
使用 OpenCvSharp 进行 Canny 边缘检测
OpenCvSharp 是一个 .NET 封装库,旨在使 OpenCV 易于在 C# 应用程序中使用。下面是一个使用 OpenCvSharp 实现 Canny 边缘检测的示例代码。
C#static void Main()
{
// 加载输入图像,以彩色模式读取
Mat src = Cv2.ImRead("1.jpg", ImreadModes.Color);
if (src.Empty())
{
Console.WriteLine("图像加载失败!");
return;
}
// 转换为灰度图像
Mat gray = new Mat();
Cv2.CvtColor(src, gray, ColorConversionCodes.BGR2GRAY);
// 高斯模糊:去噪
Mat blurred = new Mat();
Cv2.GaussianBlur(gray, blurred, new Size(5, 5), 1.4);
// 应用 Canny 边缘检测器
Mat edges = new Mat();
double threshold1 = 100;
double threshold2 = 200;
Cv2.Canny(blurred, edges, threshold1, threshold2);
// 将边缘转换为彩色以便叠加在原始图像上
Mat colorEdges = new Mat();
Cv2.CvtColor(edges, colorEdges, ColorConversionCodes.GRAY2BGR);
// 用红色 (BGR: 0, 0, 255) 绘制边缘
src.SetTo(new Scalar(0, 0, 255), edges);
// 显示结果
Cv2.ImShow("Edges in Red", src);
Cv2.WaitKey(0);
// 释放资源
gray.Dispose();
blurred.Dispose();
edges.Dispose();
colorEdges.Dispose();
src.Dispose();
Cv2.DestroyAllWindows();
}
代码解析
- 加载图像:使用
Cv2.ImRead函数读取输入图像,并将其转为灰度模式。 - 高斯模糊:应用高斯滤波器来去除图像噪声,防止在Canny检测过程中误检测到的边缘。
- Canny 边缘检测:使用
Cv2.Canny方法进行边缘检测。threshold1和threshold2分别是低阈值和高阈值。 - 显示结果:使用
Cv2.ImShow和Cv2.WaitKey显示检测结果。
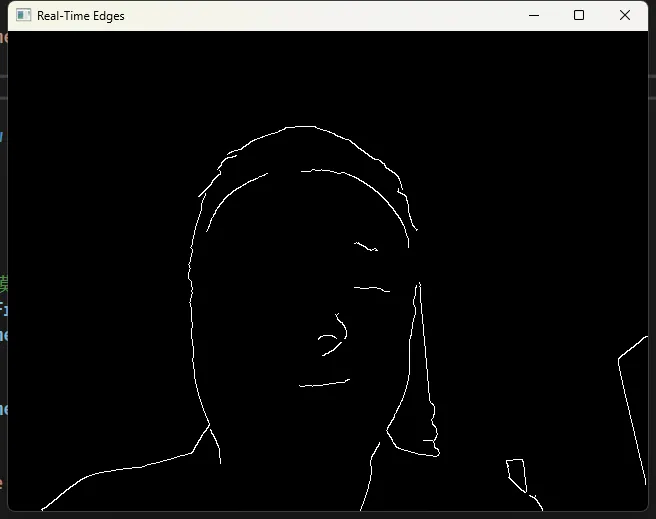
场景一:实时视频边缘检测
在实时视频处理中,我们可能需要检测每一帧中的边缘,以实现动态分析,例如运动检测或视觉追踪。
C#static void Main()
{
// 打开摄像头
using var capture = new VideoCapture(0); // 0 为默认摄像头
if (!capture.IsOpened())
{
Console.WriteLine("无法打开摄像头!");
return;
}
// 创建窗口
Cv2.NamedWindow("Real-Time Edges",WindowFlags.AutoSize);
while (true)
{
using var frame = new Mat();
capture.Read(frame);
if (frame.Empty())
break;
// 转换为灰度并进行高斯模糊
Cv2.CvtColor(frame, frame, ColorConversionCodes.BGR2GRAY);
Cv2.GaussianBlur(frame, frame, new Size(5, 5), 1.4);
// 边缘检测
Cv2.Canny(frame, frame, 100, 200);
// 显示结果
Cv2.ImShow("Real-Time Edges", frame);
// 按下 'q' 键退出
if (Cv2.WaitKey(30) == (int)ConsoleKey.Q)
break;
}
Cv2.DestroyAllWindows();
}
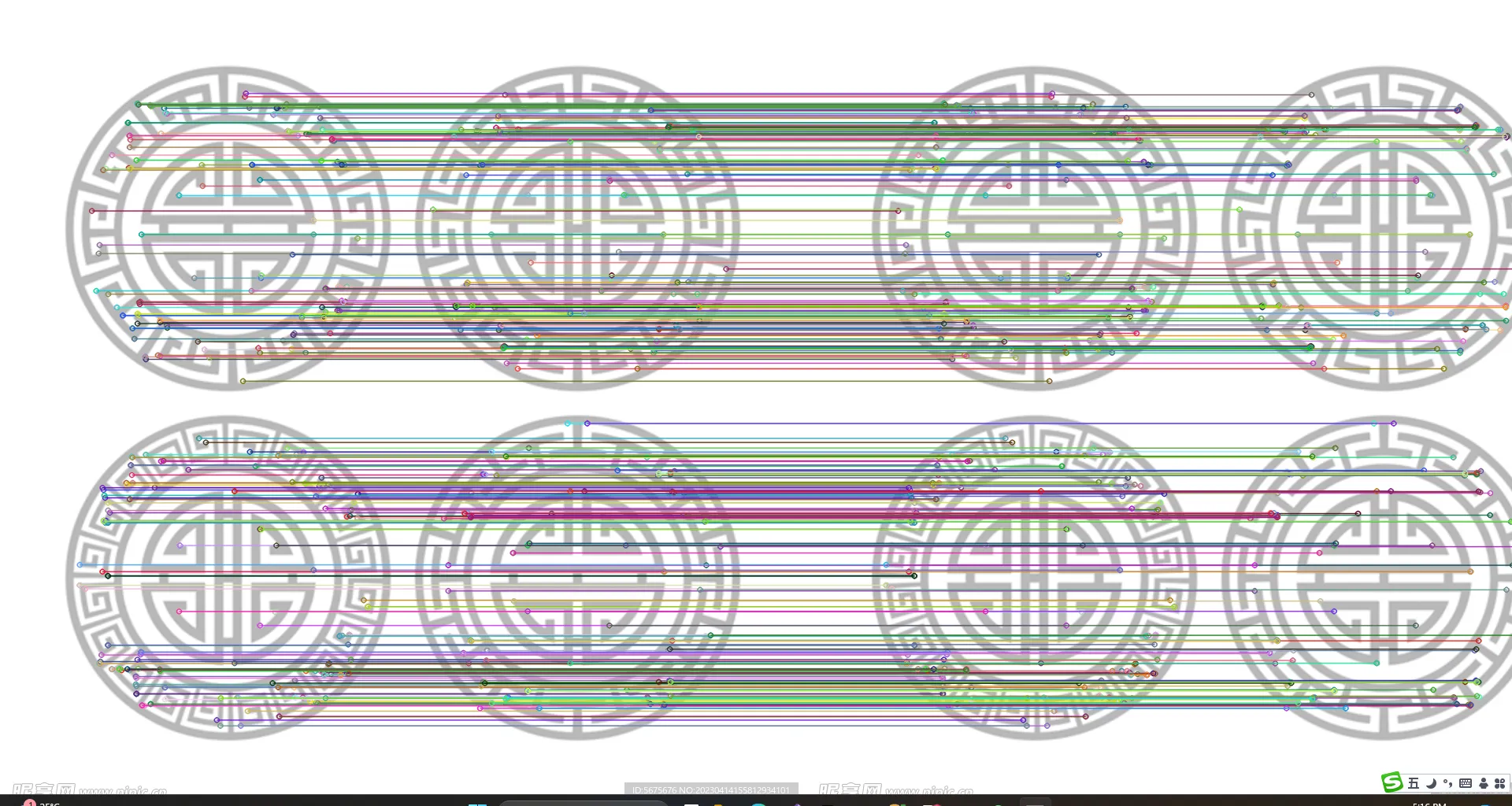
场景二:图像边缘特征匹配
在对象识别中,我们可以使用边缘特征进行图像的形状匹配或特定对象的识别。以下示例演示如何在两张图像中匹配边缘特征。
C#using OpenCvSharp;
using System;
class EdgeMatchingExample
{
static void Main(string[] args)
{
// 加载两幅图像
Mat img1 = Cv2.ImRead("image1.jpg", ImreadModes.Grayscale);
Mat img2 = Cv2.ImRead("image2.jpg", ImreadModes.Grayscale);
// 边缘检测
Mat edges1 = new Mat();
Mat edges2 = new Mat();
Cv2.Canny(img1, edges1, 100, 200);
Cv2.Canny(img2, edges2, 100, 200);
// 创建SURF/SIFT/ORB描述符提取器(ORB用于无专利限制的实现)
var orb = ORB.Create();
// 计算特征点和描述符
KeyPoint[] keypoints1, keypoints2;
Mat descriptors1 = new Mat(), descriptors2 = new Mat();
orb.DetectAndCompute(edges1, null, out keypoints1, descriptors1);
orb.DetectAndCompute(edges2, null, out keypoints2, descriptors2);
// 使用暴力匹配器
var bf = new BFMatcher(NormTypes.Hamming, crossCheck: true);
var matches = bf.Match(descriptors1, descriptors2);
// 绘制匹配结果
Mat outputImg = new Mat();
Cv2.DrawMatches(img1, keypoints1, img2, keypoints2, matches, outputImg);
Cv2.ImShow("Matches", outputImg);
Cv2.WaitKey(0);
// 释放资源
img1.Dispose();
img2.Dispose();
edges1.Dispose();
edges2.Dispose();
descriptors1.Dispose();
descriptors2.Dispose();
outputImg.Dispose();
Cv2.DestroyAllWindows();
}
}
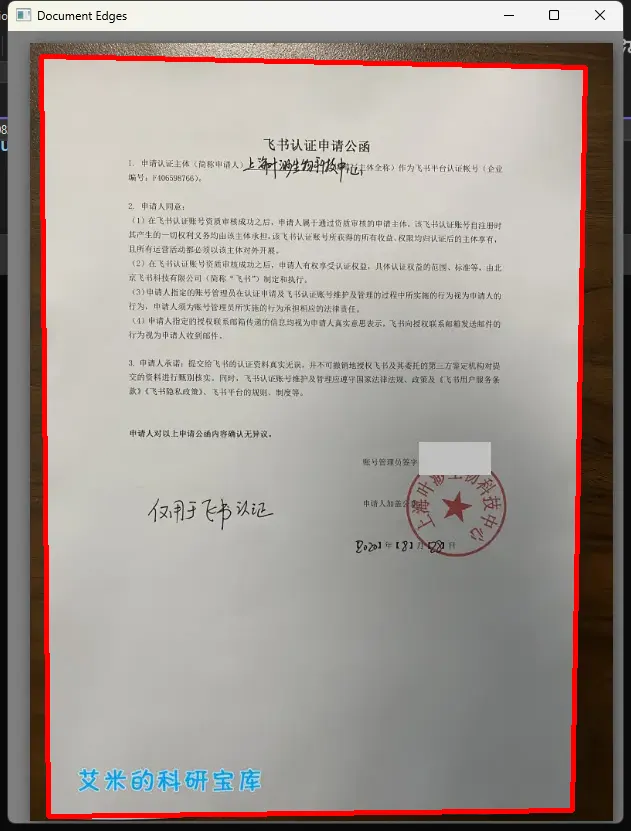
场景三:在文档扫描中进行边缘检测
在文档或名片扫描中,可以使用边缘检测来找到文档的边缘,以便自动裁剪和校正透视。
C#static void Main(string[] args)
{
Mat src = Cv2.ImRead("0mlxeo2s.png", ImreadModes.Color);
if (src.Empty())
{
Console.WriteLine("载入图像失败!");
return;
}
// 转换为灰度图像
Mat gray = new Mat();
Cv2.CvtColor(src, gray, ColorConversionCodes.BGR2GRAY);
// 应用自适应直方图均衡化(可以增强对比度)
Mat enhanced = new Mat();
Cv2.EqualizeHist(gray, enhanced);
// 高斯模糊:去噪
Cv2.GaussianBlur(enhanced, enhanced, new Size(5, 5), 1.4);
// Canny 边缘检测
Mat edges = new Mat();
Cv2.Canny(enhanced, edges, 75, 200); // 尝试不同的阈值
// 形态学操作:关闭操作以连接断开的边缘
Mat morph = new Mat();
Mat kernel = Cv2.GetStructuringElement(MorphShapes.Rect, new Size(5, 5));
Cv2.MorphologyEx(edges, morph, MorphTypes.Close, kernel);
// 寻找边缘轮廓
Cv2.FindContours(morph, out Point[][] contours, out _, RetrievalModes.List, ContourApproximationModes.ApproxSimple);
// 寻找最大轮廓,假设这就是文档
double maxArea = 0;
Point[] largestContour = null;
foreach (var contour in contours)
{
double area = Cv2.ContourArea(contour);
if (area > maxArea && area > 1000) // 排除微小的轮廓
{
var approx = Cv2.ApproxPolyDP(contour, 0.02 * Cv2.ArcLength(contour, true), true);
if (approx.Length == 4) // 确保近似多边形为四边形
{
maxArea = area;
largestContour = approx;
}
}
}
// 绘制最大轮廓
if (largestContour != null)
{
Cv2.DrawContours(src, new[] { largestContour }, -1, new Scalar(0, 0, 255), 3);
}
// 显示结果
Cv2.ImShow("Document Edges", src);
Cv2.WaitKey(0);
// 释放资源
src.Dispose();
gray.Dispose();
enhanced.Dispose();
edges.Dispose();
morph.Dispose();
kernel.Dispose();
Cv2.DestroyAllWindows();
}
调试与优化
在应用Canny边缘检测时,调整阈值参数十分重要。可以通过实验调整threshold1和threshold2以获得最佳的边缘检测效果。选择适当的高斯滤波器参数也有助于改善噪声的抑制效果。
总结
Canny边缘检测是图像处理的重要工具,具有高准确度和鲁棒性。无论是在学术研究中还是工业应用中,它都发挥了关键作用。通过OpenCvSharp,开发者可以方便地在C#环境中利用Canny边缘检测进行各类图像处理和分析任务。
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录