目录
Sobel算子是计算机视觉和图像处理中常用的边缘检测算子。它通过计算图像的梯度来检测边缘,在OpenCvSharp中有很好的实现。本文将详细介绍Sobel算子的原理以及如何在C#的OpenCvSharp库中应用它。
Sobel算子原理
Sobel算子通过在水平和垂直方向上分别对图像进行卷积来计算梯度。它使用两个3x3的卷积核:
水平方向 (Gx):
Markdown-1 0 1 -2 0 2 -1 0 1
垂直方向 (Gy):
Markdown-1 -2 -1 0 0 0 1 2 1
最终的梯度幅度通过公式 √(Gx² + Gy²) 计算得出。
参数解释
src****(InputArray):- 输入图像,也就是待处理的图像。通常是单通道(比如灰度图像),不过也可以是多通道图像。
dst****(OutputArray):- Sobel 算子处理后输出的图像。
ddepth****(MatType):- 输出图像的深度。指定数据类型非常重要,因为 Sobel 运算可能导致像素值超出原始类型的范围。
- 常用的值有
MatType.CV_8U(8 位无符号),MatType.CV_16S(16 位有符号),MatType.CV_64F(64 位浮点) 等。 - 例如,使用
CV_16S可以避免数据溢出,因为梯度可能是负数。
xorder****(int):- x 方向上的导数阶数。
dx = 1表示计算一阶导数,通常用于检测水平变化。
- x 方向上的导数阶数。
yorder****(int):- y 方向上的导数阶数。同样,
dy = 1表示计算一阶导数,通常用于检测垂直变化。
- y 方向上的导数阶数。同样,
ksize****(int,默认值为 3):- Sobel 核的大小。常用值有 1, 3, 5, 7 等。尺寸越大,检测的结果越平滑,但检测的准确性可能降低。
scale****(double,默认值为 1):- 计算完导数后的缩放系数。通常用来调整梯度的强度。默认值
1表示不缩放。
- 计算完导数后的缩放系数。通常用来调整梯度的强度。默认值
delta****(double,默认值为 0):- 加到结果上的可选偏移量。用于调整结果图像的亮度。
borderType****(BorderTypes,默认值为BorderTypes.Default):- 定义处理图像边界的像素外推方法。常用的类型有:
BorderTypes.Constant:使用固定值填充边界。BorderTypes.Reflect:对边界使用对称反射。BorderTypes.Replicate:复制边缘的值。BorderTypes.Reflect101和BorderTypes.Wrap等。
- 定义处理图像边界的像素外推方法。常用的类型有:
使用建议
- 选择合适的 ddepth:通常设置为负数,这样输出图像的深度与输入图像相同。此外,避免溢出可以使用
CV_16S。 - 调整 ksize:当ksize 增大时,检测到的边缘会更光滑,但细节可能会丢失。
- 微调 scale 和 delta:可以帮助抑制或增强特定边缘的可见性。
3. OpenCvSharp中的Sobel算子实现
在OpenCvSharp中,我们可以使用Cv2.Sobel()方法来应用Sobel算子。以下是基本用法:
C#using OpenCvSharp;
// 读取图像
Mat src = Cv2.ImRead("input.jpg", ImreadModes.Grayscale);
Mat dst = new Mat();
// 应用Sobel算子
Cv2.Sobel(src, dst, MatType.CV_16S, 1, 0);
// 转换回8位无符号整型
Mat abs_dst = new Mat();
Cv2.ConvertScaleAbs(dst, abs_dst);
// 显示结果
Cv2.ImShow("Sobel Edge Detection", abs_dst);
Cv2.WaitKey(0);
4. 详细示例
4.1 基本边缘检测
让我们看一个更完整的例子,包括水平和垂直方向的边缘检测:
C#using OpenCvSharp;
class Program
{
static void Main(string[] args)
{
// 读取图像
Mat src = Cv2.ImRead("input.jpg", ImreadModes.Grayscale);
Mat dst = new Mat();
Mat abs_dst = new Mat();
// 水平方向Sobel
Cv2.Sobel(src, dst, MatType.CV_16S, 1, 0);
Cv2.ConvertScaleAbs(dst, abs_dst);
Cv2.ImShow("Horizontal Sobel", abs_dst);
// 垂直方向Sobel
Cv2.Sobel(src, dst, MatType.CV_16S, 0, 1);
Cv2.ConvertScaleAbs(dst, abs_dst);
Cv2.ImShow("Vertical Sobel", abs_dst);
// 计算总梯度
Mat grad_x = new Mat();
Mat grad_y = new Mat();
Cv2.Sobel(src, grad_x, MatType.CV_16S, 1, 0);
Cv2.Sobel(src, grad_y, MatType.CV_16S, 0, 1);
Mat abs_grad_x = new Mat();
Mat abs_grad_y = new Mat();
Cv2.ConvertScaleAbs(grad_x, abs_grad_x);
Cv2.ConvertScaleAbs(grad_y, abs_grad_y);
Mat grad = new Mat();
Cv2.AddWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
Cv2.ImShow("Total Gradient", grad);
Cv2.WaitKey(0);
}
}

4.2 调整Sobel参数
Sobel算子允许我们调整多个参数来优化边缘检测效果。以下示例展示了如何调整这些参数:
C#using OpenCvSharp;
class Program
{
static void Main(string[] args)
{
Mat src = Cv2.ImRead("input.jpg", ImreadModes.Grayscale);
Mat dst = new Mat();
// 调整ksize参数
for (int ksize = 1; ksize <= 7; ksize += 2)
{
Cv2.Sobel(src, dst, MatType.CV_16S, 1, 1, ksize);
Mat abs_dst = new Mat();
Cv2.ConvertScaleAbs(dst, abs_dst);
Cv2.ImShow($"Sobel ksize={ksize}", abs_dst);
}
// 调整scale参数
double[] scales = { 1, 2, 0.5 };
foreach (double scale in scales)
{
Cv2.Sobel(src, dst, MatType.CV_16S, 1, 1, 3, scale);
Mat abs_dst = new Mat();
Cv2.ConvertScaleAbs(dst, abs_dst);
Cv2.ImShow($"Sobel scale={scale}", abs_dst);
}
Cv2.WaitKey(0);
}
}

4.3 彩色图像的Sobel边缘检测
对于彩色图像,我们可以分别处理每个颜色通道,然后合并结果:
C#using OpenCvSharp;
class Program
{
static void Main(string[] args)
{
Mat src = Cv2.ImRead("input.jpg", ImreadModes.Color);
Mat[] channels = Cv2.Split(src);
Mat[] gradients = new Mat[3];
for (int i = 0; i < 3; i++)
{
Mat grad_x = new Mat();
Mat grad_y = new Mat();
Cv2.Sobel(channels[i], grad_x, MatType.CV_16S, 1, 0);
Cv2.Sobel(channels[i], grad_y, MatType.CV_16S, 0, 1);
Mat abs_grad_x = new Mat();
Mat abs_grad_y = new Mat();
Cv2.ConvertScaleAbs(grad_x, abs_grad_x);
Cv2.ConvertScaleAbs(grad_y, abs_grad_y);
gradients[i] = new Mat();
Cv2.AddWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, gradients[i]);
}
Mat result = new Mat();
Cv2.Merge(gradients, result);
Cv2.ImShow("Color Sobel Edge Detection", result);
Cv2.WaitKey(0);
}
}
4.4 Sobel与其他边缘检测算子的比较
为了更好地理解Sobel算子的特点,我们可以将其与其他常用的边缘检测算子进行比较:
C#using OpenCvSharp;
class Program
{
static void Main(string[] args)
{
Mat src = Cv2.ImRead("input.jpg", ImreadModes.Grayscale);
Mat dst = new Mat();
// Sobel
Mat grad_x = new Mat();
Mat grad_y = new Mat();
Cv2.Sobel(src, grad_x, MatType.CV_16S, 1, 0);
Cv2.Sobel(src, grad_y, MatType.CV_16S, 0, 1);
Mat abs_grad_x = new Mat();
Mat abs_grad_y = new Mat();
Cv2.ConvertScaleAbs(grad_x, abs_grad_x);
Cv2.ConvertScaleAbs(grad_y, abs_grad_y);
Mat sobel = new Mat();
Cv2.AddWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, sobel);
Cv2.ImShow("Sobel", sobel);
// Scharr
Cv2.Scharr(src, grad_x, MatType.CV_16S, 1, 0);
Cv2.Scharr(src, grad_y, MatType.CV_16S, 0, 1);
Cv2.ConvertScaleAbs(grad_x, abs_grad_x);
Cv2.ConvertScaleAbs(grad_y, abs_grad_y);
Mat scharr = new Mat();
Cv2.AddWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, scharr);
Cv2.ImShow("Scharr", scharr);
// Laplacian
Mat laplacian = new Mat();
Cv2.Laplacian(src, laplacian, MatType.CV_16S);
Cv2.ConvertScaleAbs(laplacian, laplacian);
Cv2.ImShow("Laplacian", laplacian);
// Canny
Mat canny = new Mat();
Cv2.Canny(src, canny, 100, 200);
Cv2.ImShow("Canny", canny);
Cv2.WaitKey(0);
}
}

5. 实际应用场景
Sobel算子在多个计算机视觉应用中都有重要作用,以下是一些实际应用示例:
5.1 文本检测
在OCR(光学字符识别)系统中,Sobel算子可以用来检测文本区域:
C#using OpenCvSharp;
class Program
{
static void Main(string[] args)
{
Mat src = Cv2.ImRead("document.jpg", ImreadModes.Grayscale);
Mat grad_x = new Mat();
Mat grad_y = new Mat();
Cv2.Sobel(src, grad_x, MatType.CV_16S, 1, 0);
Cv2.Sobel(src, grad_y, MatType.CV_16S, 0, 1);
Mat abs_grad_x = new Mat();
Mat abs_grad_y = new Mat();
Cv2.ConvertScaleAbs(grad_x, abs_grad_x);
Cv2.ConvertScaleAbs(grad_y, abs_grad_y);
Mat grad = new Mat();
Cv2.AddWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
Mat binary = new Mat();
Cv2.Threshold(grad, binary, 50, 255, ThresholdTypes.Binary);
Cv2.ImShow("Text Detection", binary);
Cv2.WaitKey(0);
}
}
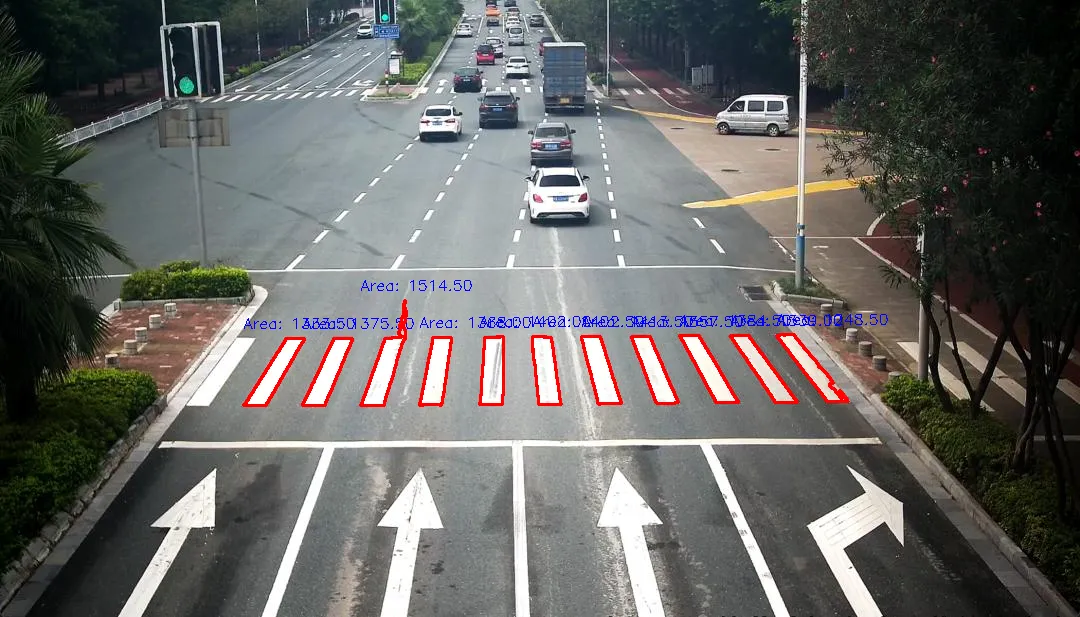
5.2 车道线检测
在自动驾驶系统中,Sobel算子可以用于检测道路上的车道线:
C#static void Main(string[] args)
{
// 读取图像
Mat src = Cv2.ImRead("984.jpg");
if (src.Empty())
{
Console.WriteLine("Cannot load image!");
return;
}
// 转换为灰度图像
Mat gray = new Mat();
Cv2.CvtColor(src, gray, ColorConversionCodes.BGR2GRAY);
// 二值化以获得白色区域
Mat binary = new Mat();
Cv2.Threshold(gray, binary, 200, 255, ThresholdTypes.Binary);
// 形态学操作以处理噪声和小裂缝
Mat kernel = Cv2.GetStructuringElement(MorphShapes.Rect, new Size(1,1));
Mat morph = new Mat();
Cv2.MorphologyEx(binary, morph, MorphTypes.Close, kernel);
// 查找外部轮廓
Point[][] contours;
HierarchyIndex[] hierarchy;
Cv2.FindContours(morph, out contours, out hierarchy, RetrievalModes.External, ContourApproximationModes.ApproxSimple);
// 创建用于绘制结果的图像
Mat result = src.Clone();
// 设置面积、宽度和高度阈值
double minArea = 1000; // 设置最小面积,单位为像素
double maxArea = 10000; // 设置最大面积,单位为像素
int minWidth = 10; // 设置最小宽度,单位为像素
int maxWidth = 60; // 设置最大宽度,单位为像素
int minHeight = 60; // 设置最小高度(长度),单位为像素
int maxHeight = 120; // 设置最大高度(长度),单位为像素
foreach (var contour in contours)
{
// 计算轮廓的面积
double area = Cv2.ContourArea(contour);
// 获取当前轮廓的外接矩形
Rect boundingBox = Cv2.BoundingRect(contour);
// 检查面积、宽度和高度是否在指定范围内
if (
boundingBox.Height >= minHeight && boundingBox.Height <= maxHeight)
{
//在结果图像上绘制符合条件的轮廓
Cv2.DrawContours(result, new[] { contour }, -1, new Scalar(0, 0, 255), 2);
// 在每个轮廓上方显示其面积
string areaText = $"Area: {area:F2}";
Cv2.PutText(result, areaText, new Point(boundingBox.X, boundingBox.Y - 10),
HersheyFonts.HersheySimplex, 0.5, new Scalar(255, 0, 0), 1);
}
}
// 显示结果
Cv2.ImShow("Filtered Detection", result);
Cv2.WaitKey(0);
}
6. 结论
Sobel算子是一种强大而灵活的边缘检测工具,在OpenCvSharp中有excellent的实现。通过调整参数和结合其他图像处理技术,我们可以在各种计算机视觉任务中有效地使用Sobel算子。希望本文的详细示例能帮助您更好地理解和应用Sobel算子。
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录