目录
1. 什么是ORB?
ORB (Oriented FAST and Rotated BRIEF) 是一种快速稳健的局部特征描述子,由 Ethan Rublee 等人在2011年提出。它是FAST关键点检测和BRIEF描述子的结合,并在此基础上做了改进,添加了一些新特性以增强性能。
1.1 ORB的主要特点
- 计算效率高:ORB的计算速度比SIFT快两个数量级,比SURF快一个数量级。
- 旋转不变性:通过计算关键点的主方向,ORB具有良好的旋转不变性。
- 尺度不变性:通过构建图像金字塔,ORB可以检测多尺度的特征点。
- 对噪声具有鲁棒性:ORB对图像噪声和仿射变换具有较强的抵抗力。
- 无需专利许可:与SIFT和SURF不同,ORB是开源的,可以免费使用。
2. ORB在OpenCvSharp中的实现
在OpenCvSharp中,ORB算法主要通过ORB类来实现。下面我们将详细介绍如何使用OpenCvSharp来进行ORB特征检测和匹配。
2.1 ORB特征检测
以下是使用OpenCvSharp进行ORB特征检测的基本步骤:
- 创建ORB对象
- 检测关键点
- 计算描述子
下面是一个完整的代码示例:
C#public partial class Form7 : Form
{
private Mat originalImage;
public Form7()
{
InitializeComponent();
}
private void btnLoadImage_Click(object sender, EventArgs e)
{
using (OpenFileDialog ofd = new OpenFileDialog())
{
ofd.Filter = "Image Files|*.jpg;*.jpeg;*.png;*.bmp";
if (ofd.ShowDialog() == DialogResult.OK)
{
originalImage = new Mat(ofd.FileName, ImreadModes.Color);
DisplayImage(originalImage);
btnDetectFeatures.Enabled = true;
}
}
}
private void DisplayImage(Mat image)
{
try
{
using (var bitmap = BitmapConverter.ToBitmap(image))
{
if (pic.Image != null)
{
pic.Image.Dispose();
}
pic.Image = new Bitmap(bitmap);
}
}
catch (Exception ex)
{
MessageBox.Show($"Error displaying image: {ex.Message}");
}
}
protected override void OnFormClosing(FormClosingEventArgs e)
{
base.OnFormClosing(e);
originalImage?.Dispose();
}
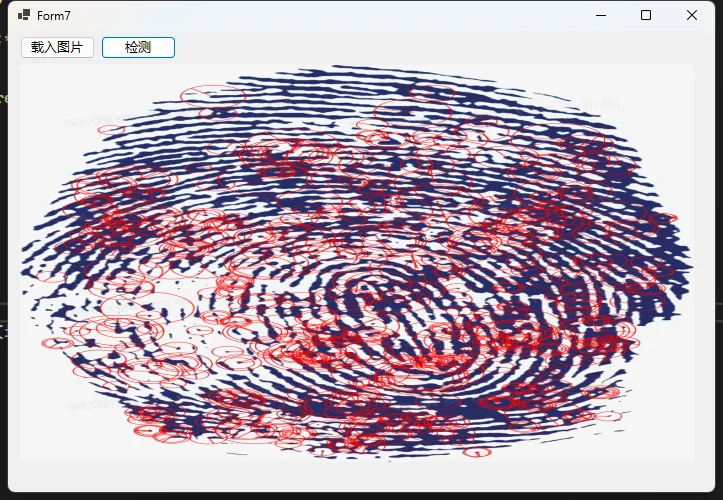
private void btnDetectFeatures_Click(object sender, EventArgs e)
{
if (originalImage == null)
return;
try
{
// 创建ORB对象
using var orb = ORB.Create(500); // 最多检测500个特征点
// 检测关键点
KeyPoint[] keypoints = orb.Detect(originalImage);
// 计算描述子
using var descriptors = new Mat();
orb.Compute(originalImage, ref keypoints, descriptors);
// 创建一个新的Mat来绘制结果
using var result = new Mat();
// 绘制关键点,使用红色圆圈标记特征点
Cv2.DrawKeypoints(originalImage, keypoints, result,
new Scalar(0, 0, 255), // 红色
DrawMatchesFlags.DrawRichKeypoints); // 绘制带有大小和方向的关键点
// 显示结果
DisplayImage(result);
MessageBox.Show($"检测到 {keypoints.Length} 个ORB特征点");
}
catch (Exception ex)
{
MessageBox.Show($"Error detecting features: {ex.Message}");
}
}
}
2.2 ORB特征匹配
ORB特征匹配通常用于图像配准、目标识别等任务。以下是使用OpenCvSharp进行ORB特征匹配的步骤:
- 对两幅图像分别进行ORB特征检测
- 使用暴力匹配器(BFMatcher)进行特征匹配
- 应用比率测试来筛选好的匹配
下面是一个完整的代码示例:
C#static void Main(string[] args)
{
MatchORBFeatures("grey.jpg", "pur.jpg");
}
public static void MatchORBFeatures(string imagePath1, string imagePath2)
{
// 读取图像
using var img1 = new Mat(imagePath1, ImreadModes.Color);
using var img2 = new Mat(imagePath2, ImreadModes.Color);
// 创建ORB对象
using var orb = ORB.Create(500);
// 检测关键点并计算描述子
KeyPoint[] keypoints1, keypoints2;
using var descriptors1 = new Mat();
using var descriptors2 = new Mat();
orb.DetectAndCompute(img1, null, out keypoints1, descriptors1);
orb.DetectAndCompute(img2, null, out keypoints2, descriptors2);
// 创建BFMatcher对象
using var matcher = new BFMatcher(NormTypes.Hamming, crossCheck: true);
// 进行特征匹配
DMatch[] matches = matcher.Match(descriptors1, descriptors2);
// 绘制匹配结果
using var imgMatches = new Mat();
Cv2.DrawMatches(img1, keypoints1, img2, keypoints2, matches, imgMatches);
// 保存结果
imgMatches.SaveImage("orb_matches.jpg");
Console.WriteLine($"找到 {matches.Length} 个匹配点");
}
3. ORB的应用场景
ORB算法因其高效和稳健的特性,在计算机视觉领域有广泛的应用。以下是一些常见的应用场景:
- 图像拼接:利用ORB特征匹配可以实现全景图像的拼接。
- 目标识别:通过匹配ORB特征可以在复杂背景中识别特定目标。
- 图像检索:ORB特征可以用于构建图像特征索引,实现大规模图像检索。
- 视觉里程计:在机器人和自动驾驶领域,ORB可用于估计相机运动。
- 增强现实:ORB可用于实时跟踪和定位,支持增强现实应用。
4. ORB参数调优
在实际应用中,可能需要根据具体场景调整ORB的参数以获得最佳效果。以下是一些重要的参数及其影响:
- nFeatures:要检测的特征点数量。增加这个值可以检测更多特征,但会增加计算时间。
- scaleFactor:图像金字塔的尺度因子。较小的值会产生更多的图像层,有利于检测不同尺度的特征,但会增加计算量。
- nLevels:图像金字塔的层数。增加层数可以检测更多尺度的特征,但会增加内存消耗。
- edgeThreshold:边缘阈值,用于控制特征点与图像边缘的距离。
- firstLevel:金字塔的第一层级。通常设为0。
- wtaK:生成BRIEF描述子时用于产生每个元素的点对数。
- scoreType:关键点评分类型,可以是
HARRIS_SCORE或FAST_SCORE。 - patchSize:用于方向计算的补丁大小。
以下是一个调整ORB参数的示例:
C#public static void TuneORBParameters(string imagePath)
{
using var src = new Mat(imagePath, ImreadModes.Color);
// 创建ORB对象并调整参数
using var orb = ORB.Create(
nFeatures: 1000,
scaleFactor: 1.2f,
nLevels: 8,
edgeThreshold: 31,
firstLevel: 0,
wtaK: 2,
scoreType: ORBScoreType.Fast,
patchSize: 31,
fastThreshold: 20
);
KeyPoint[] keypoints = orb.Detect(src);
using var result = new Mat();
Cv2.DrawKeypoints(src, keypoints, result);
result.SaveImage("orb_tuned_features.jpg");
Console.WriteLine($"使用调优后的参数检测到 {keypoints.Length} 个ORB特征点");
}
5. ORB vs SIFT vs SURF
虽然ORB在许多应用中表现出色,但它并非在所有情况下都是最佳选择。下面是ORB与SIFT和SURF的简要比较:
| 特性 | ORB | SIFT | SURF |
|---|---|---|---|
| 速度 | 最快 | 最慢 | 中等 |
| 准确性 | 良好 | 最高 | 高 |
| 旋转不变性 | 是 | 是 | 是 |
| 尺度不变性 | 有限 | 是 | 是 |
| 内存消耗 | 低 | 高 | 中等 |
| 专利限制 | 无 | 有 | 有 |
选择哪种算法取决于具体的应用场景、性能要求和硬件限制。
6. 结论
ORB算法在OpenCvSharp中的实现为C#开发者提供了一个强大而高效的特征检测和匹配工具。它在保持较高准确性的同时,具有出色的计算效率,使其成为实时应用的理想选择。通过本文的介绍和示例,您应该能够开始在自己的项目中使用ORB算法,并根据需要进行参数调优。
记住,虽然ORB在许多情况下表现优异,但在选择特征检测算法时,始终要考虑到具体的应用需求和约束条件。在某些要求极高精度的场景中,SIFT或SURF可能是更好的选择。
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!