目录
OpenCvSharp 是 OpenCV 库的 .NET 封装,使开发者能够在 C# 中使用 OpenCV 的强大功能。其中,直线检测是一个常见的计算机视觉任务,可以用于车道检测、几何分析等多种应用。本文将详细介绍如何使用 OpenCvSharp 在图像中进行直线检测,并提供多个示例代码。
安装 OpenCvSharp
在开始之前,你需要确保在项目中安装 OpenCvSharp 库。你可以通过 NuGet 包管理器安装:
PowerShellInstall-Package OpenCvSharp4 Install-Package OpenCvSharp4.runtime.win
基本概念
在进行直线检测时,最常用的算法是 Hough 变换(Hough Transform)。OpenCvSharp 提供了两种 Hough 变换方法:
HoughLines: 检测参数化空间中的直线。HoughLinesP: 检测端点的概率直线(常称为面向短线的 Hough 变换)。
使用 HoughLines 检测直线
HoughLines 方法用于从二值图像中检测直线。通常需要先对图像进行边缘检测,如使用 Canny 边缘检测。
示例代码
C#static void Main(string[] args)
{
// 读取图像
Mat src = Cv2.ImRead("example.png", ImreadModes.Grayscale);
// 使用 Canny 进行边缘检测
Mat edges = new Mat();
Cv2.Canny(src, edges, 50, 150);
// 使用 HoughLinesP 函数,设置最小线段长度为100,并设置最大间隙为10
LineSegmentPoint[] linesP = Cv2.HoughLinesP(edges, 1, Cv2.PI / 180, 50, minLineLength: 100, maxLineGap: 10);
// 创建结果图像
Mat result = new Mat();
Cv2.CvtColor(edges, result, ColorConversionCodes.GRAY2BGR);
// 绘制检测到的线段
foreach (var line in linesP)
{
Cv2.Line(result, line.P1, line.P2, Scalar.Red, 2);
}
// 显示结果图像
Cv2.ImShow("Detected Line Segments", result);
Cv2.WaitKey(0);
}
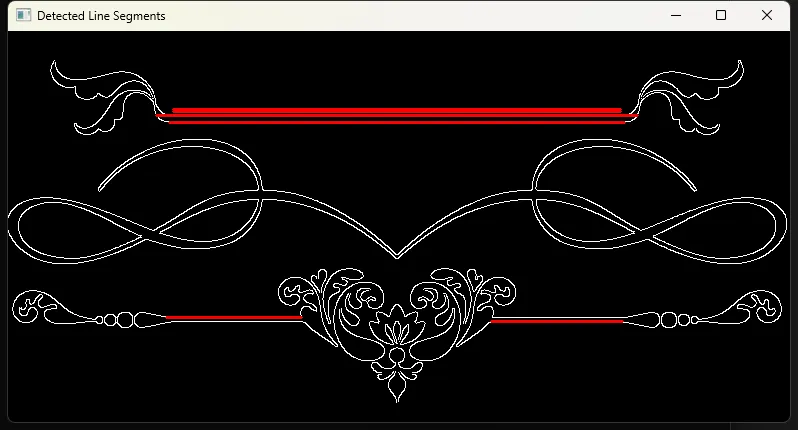
代码要点
- Canny 边缘检测: 首先对图像进行边缘检测,为后续的直线检测提供输入。
- HoughLinesP: 使用概率霍夫变换,这允许你指定
minLineLength以过滤掉较短的线段。minLineLength: 所需的最小线段长度。如指定为 100,只检测长度超过 100 个像素的线段。maxLineGap: 同一直线上两点之间允许的最大间隙。
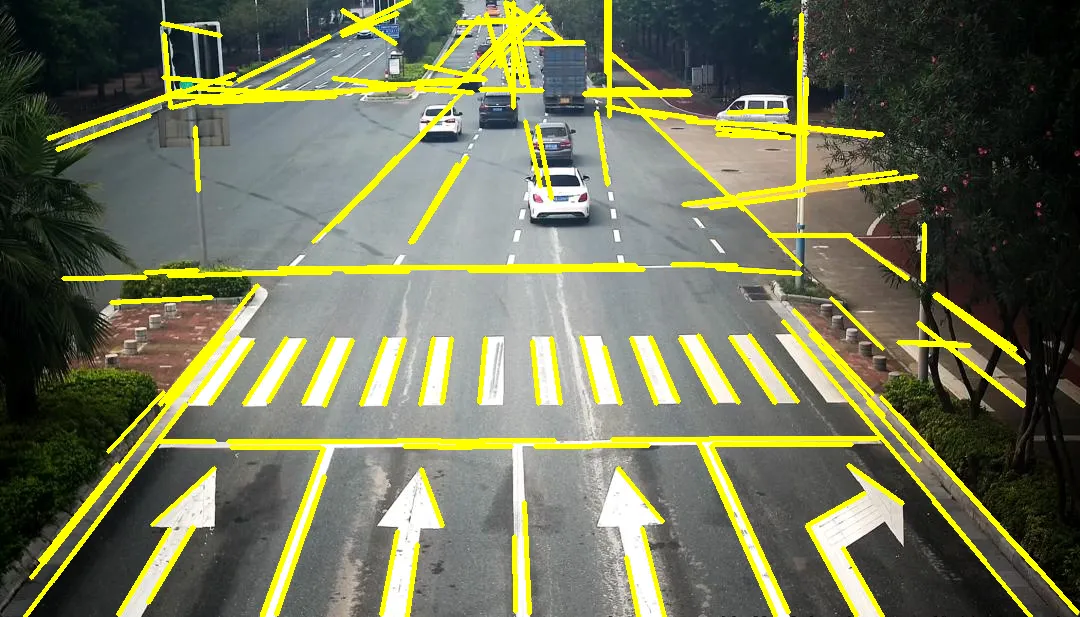
用于车道检测的直线检测
C#static void Main(string[] args)
{
// 读取图像
Mat src = Cv2.ImRead("example.png");
// 转换为灰度图像
Mat gray = new Mat();
Cv2.CvtColor(src, gray, ColorConversionCodes.BGR2GRAY);
// 使用高斯滤波减少噪声
Mat blurred = new Mat();
Cv2.GaussianBlur(gray, blurred, new Size(5, 5), 1.5);
// 使用 Canny 进行边缘检测
Mat edges = new Mat();
Cv2.Canny(blurred, edges, 50, 150);
// 使用 HoughLinesP 检测直线
LineSegmentPoint[] lines = Cv2.HoughLinesP(edges, 1, Math.PI / 180, 50, minLineLength: 50, maxLineGap: 10);
// 绘制检测到的线段
foreach (var line in lines)
{
Cv2.Line(src, line.P1, line.P2, Scalar.Yellow, 3);
}
// 显示结果
Cv2.ImShow("Lane Lines", src);
Cv2.WaitKey(0);
Cv2.DestroyAllWindows();
}
结论
通过本文,你应该能够在 C# 中使用 OpenCvSharp 执行基本的直线检测。Hough 变换是一个强有力的工具,允许对多种图像生成几何信息。为了提高检测精度,可能需要根据不同图像特点微调参数。希望这些示例代码能帮助你在项目中成功应用直线检测技术。
使用 OpenCvSharp 进行直线检测
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录