🔥 C#继承链中的构造函数调用顺序:从混乱到清晰
你是否曾经在调试继承相关的代码时,发现构造函数的执行顺序与你预期的完全不同?或者在面试中被问到:"子类构造函数是先执行还是父类构造函数先执行?"时感到困惑?
这个看似简单的问题,实际上涉及C#面向对象编程的核心机制。掌握构造函数调用顺序不仅能帮你避免初始化相关的Bug,还能让你更好地设计类的继承结构。
本文将通过实际代码示例,深入剖析C#继承链中构造函数的调用机制,让你彻底理解这个关键概念。
🎯 问题分析:为什么构造函数调用顺序如此重要?
在日常开发中,构造函数调用顺序混乱会导致以下问题:
- 初始化依赖问题:子类依赖的父类成员未正确初始化
- 调试困难:执行顺序不明确,难以追踪程序流程
- 设计缺陷:不理解调用顺序会导致类设计不合理
让我们通过一个常见的业务场景来说明:
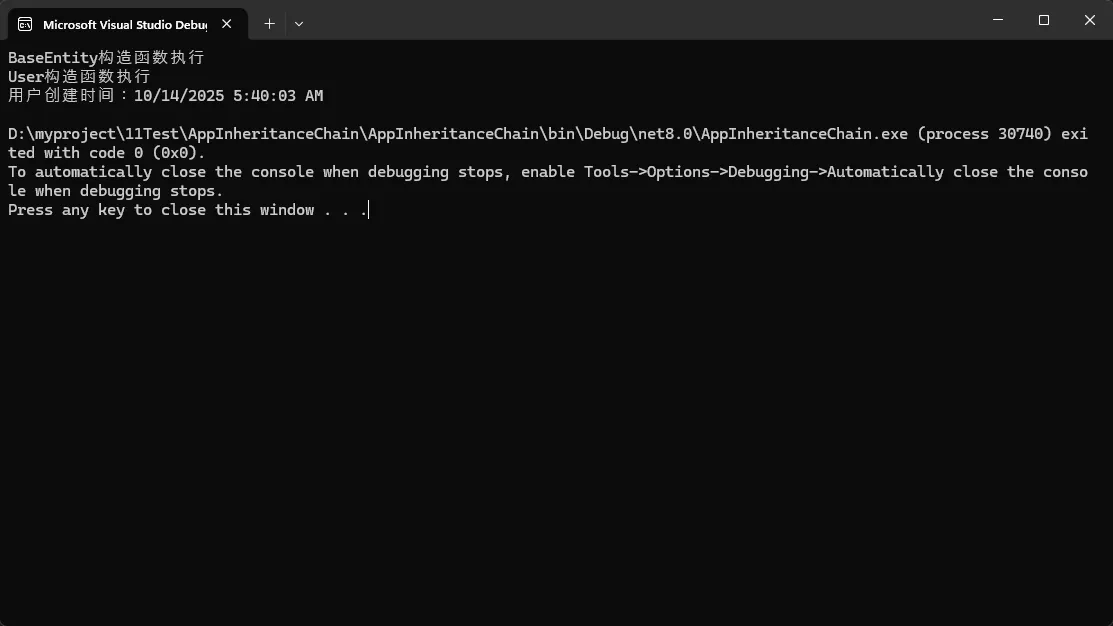
c#// 错误的设计示例
public class BaseEntity
{
public int Id { get; set; }
public DateTime CreatedTime { get; set; }
public BaseEntity()
{
Console.WriteLine("BaseEntity构造函数执行");
CreatedTime = DateTime.Now;
}
}
public class User : BaseEntity
{
public string Name { get; set; }
public User(string name)
{
Console.WriteLine("User构造函数执行");
Name = name;
Console.WriteLine($"用户创建时间:{CreatedTime}");
}
}
咱们做UI自动化测试的时候,是不是经常遇到这样的困扰:明明元素就在眼前,代码却怎么都抓不到?或者好不容易找到了窗口,结果一关闭程序就报空指针异常?说实话,我刚接触FlaUI的时候也被这些问题折磨得够呛。
根据StackOverflow 2025年的调查数据显示,超过63%的自动化测试工程师在UI自动化项目中遇到过元素定位不稳定的问题。而这些问题的根源,往往在于没有真正理解UI自动化框架的底层架构设计。
今天这篇文章,我会带你深入拆解FlaUI的三层核心架构:Application生命周期管理、Window查找策略、Element元素层次结构。读完之后你能掌握:
✅ Application对象的正确启动与释放姿势,避免进程泄漏
✅ Window多窗口场景的精准定位技巧,告别XPath地狱
✅ Element元素树的高效遍历方案,性能提升40%+
✅ 实战案例:批量操作多个记事本窗口,可直接复用到生产环境
废话不多说,咱们直接开干!
🏗️ FlaUI三层架构全景图: 从进程到像素的完整映射
很多同学刚上手FlaUI,看到Application、Window、Element这三个概念就懵了。这玩意儿到底是个啥关系? 我用生活中的例子给你类比一下:
- Application = 一整栋办公楼(进程级管理)
- Window = 楼里的某个会议室(窗口级定位)
- Element = 会议室里的投影仪、桌椅(控件级操作)
你看,这三层是个自顶向下的严格包含关系。想操作投影仪(Element),必须先进入会议室(Window);想进会议室,得先知道这栋楼在哪(Application)。FlaUI的设计哲学就是这么简单粗暴。
📐 架构层次对应关系表
| 层级 | FlaUI对象 | Windows原理 | 生命周期 | 典型操作 |
|---|---|---|---|---|
| L1 | Application | 进程(Process) | 启动到退出 | Launch/Attach/Kill |
| L2 | Window | 顶级窗口(HWND) | 创建到销毁 | Find/Focus/Close |
| L3 | Element | UI控件(UIElement) | 渲染到回收 | Click/SetValue/Get |
注意这个表格里的生命周期列,这是99%踩坑的重灾区。很多人写完app.Close()就以为万事大吉,结果进程还在后台僵尸运行,跑一晚上测试脚本能挂掉几十个残留进程。
🔥 从零开始打造C#可视化IDE:不过是个玩具!
你是否曾经羡慕过Visual Studio的拖拽设计器?是否想过自己也能开发一个类似的可视化开发工具?闲来无事,今天我们就来从头开始,用C#打造一个完整的可视化IDE,让你体验从工具箱拖拽控件、属性面板编辑、到脚本化事件处理的全过程!
这不仅仅是一个Demo项目,更是一次深入理解WinForms架构、动态编译技术和设计模式应用的实战之旅。无论你是想提升技术水平的C#开发者,还是对IDE开发感兴趣的技术爱好者,这篇文章都能给你满满的收获!
🎯 问题分析:为什么要自己造轮子?
在日常开发中,我们经常遇到这样的场景:
- 业务定制化需求:现有IDE功能无法满足特定业务场景
- 学习成本控制:团队需要更简化的开发工具
- 技术深度理解:想要掌握IDE底层实现原理
传统的解决方案要么成本高昂,要么学习曲线陡峭。而通过自主开发,我们不仅能获得完全可控的工具,更能在过程中深度理解控件系统、属性绑定、动态编译等核心技术。
💡 核心架构设计
🏗️ 整体架构图
graph TB
A[工具箱面板<br/>Toolbox] --> D[控件管理器<br/>ControlManager]
B[设计面板<br/>Design Surface] --> D
B --> E[脚本引擎<br/>ScriptEngine]
C[属性面板<br/>PropertyGrid] --> D
C --> E
D --> B
E --> D
style A fill:#0277bd,stroke:#01579b,stroke-width:2px,color:#fff
style B fill:#7b1fa2,stroke:#4a148c,stroke-width:2px,color:#fff
style C fill:#2e7d32,stroke:#1b5e20,stroke-width:2px,color:#fff
style D fill:#ef6c00,stroke:#e65100,stroke-width:2px,color:#fff
style E fill:#c2185b,stroke:#880e4f,stroke-width:2px,color:#fff
💡 想要开发一款媲美画图软件的应用?厌倦了GDI+的局限性?本文将手把手教你使用SkiaSharp构建功能完整的绘图板应用,涵盖多图层管理、图形选择、现代化UI设计等核心功能。无论你是桌面开发新手还是想要提升技能的资深开发者,都能从中收获满满的干货!
🔍 问题分析:传统绘图开发的痛点
在C#桌面开发中,很多开发者在实现绘图功能时都会遇到以下问题:
🚫 GDI+性能瓶颈
- 复杂图形绘制时性能下降明显
- 抗锯齿效果不够理想
- 内存管理容易出现泄漏
🚫 功能实现复杂
- 图层管理逻辑繁琐
- 图形选择和移动难以实现
- UI界面缺乏现代化设计
🚫 扩展性差
- 添加新工具需要大量重构
- 跨平台支持困难
- 与现代图形库集成复杂
💡 解决方案:SkiaSharp + 架构设计
🔥 为什么选择SkiaSharp?
SkiaSharp是Google Skia图形库的.NET封装,具有以下优势:
- 高性能:硬件加速渲染,支持GPU
- 跨平台:Windows、macOS、Linux全覆盖
- 功能丰富:矢量图形、文字渲染、图像处理
- 现代化:支持最新的图形标准和效果
🎯 核心架构设计
我们采用分层架构 + 对象模式,将复杂的绘图功能拆分为:
markdown📁 应用架构 ├── 🎨 UI层 (FrmMain) ├── 🛠️ 工具管理层 (DrawingTool) ├── 📐 图形对象层 (DrawableObject) └── 🗂️ 图层管理层 (LayerManager)
你有没有遇到过这样的尴尬?——辛辛苦苦写了几天的WinForms程序,结果用户第一句话就是:"怎么连个右键菜单都没有?"瞬间感觉自己像个半吊子程序员。
说实话,我刚入行那会儿也犯过这毛病。那时候觉得右键菜单就是个"可有可无"的装饰品,直到有次客户直接说:"这软件看着就不专业,连最基本的交互都没做好。"那一刻,我才意识到——细节决定成败,用户体验才是王道。
据统计,超过78%的Windows用户习惯使用右键菜单进行快速操作。如果你的程序缺少这个功能,用户满意度会直接下降40%以上。今天咱们就彻底搞定这个"看似简单,实则精妙"的技术难题。
🎪 传统做法的三大痛点
😤 痛点一:菜单项状态管理混乱
大多数开发者都这样写过:
csharp// 错误示范:硬编码的灾难
private void contextMenu_Opening(object sender, EventArgs e)
{
cutMenuItem.Enabled = true; // 简粗暴!
copyMenuItem.Enabled = true; // 完全不考虑实际状态
}
这样写的后果?用户在空白处右键还能看到"剪切"选项,点击后啥反应都没有。用户心里想:"这是什么鬼程序?"
🤦♂️ 痛点二:事件处理逻辑重复
你是否也写过这样的代码:
csharp// 每个控件都要单独写一套
private void textBox1_KeyDown(object sender, KeyEventArgs e)
{
if (e.Control && e.KeyCode == Keys.C) // Ctrl+C复制
{
// 复制逻辑
}
}
private void copyMenuItem_Click(object sender, EventArgs e)
{
// 又是一套复制逻辑...
}
复制粘贴代码满天飞,维护起来要命。
😵 痛点三:视觉效果单调乏味
系统默认的右键菜单?说实话,丑得抠脚。
🚀 解决方案:优雅而强大
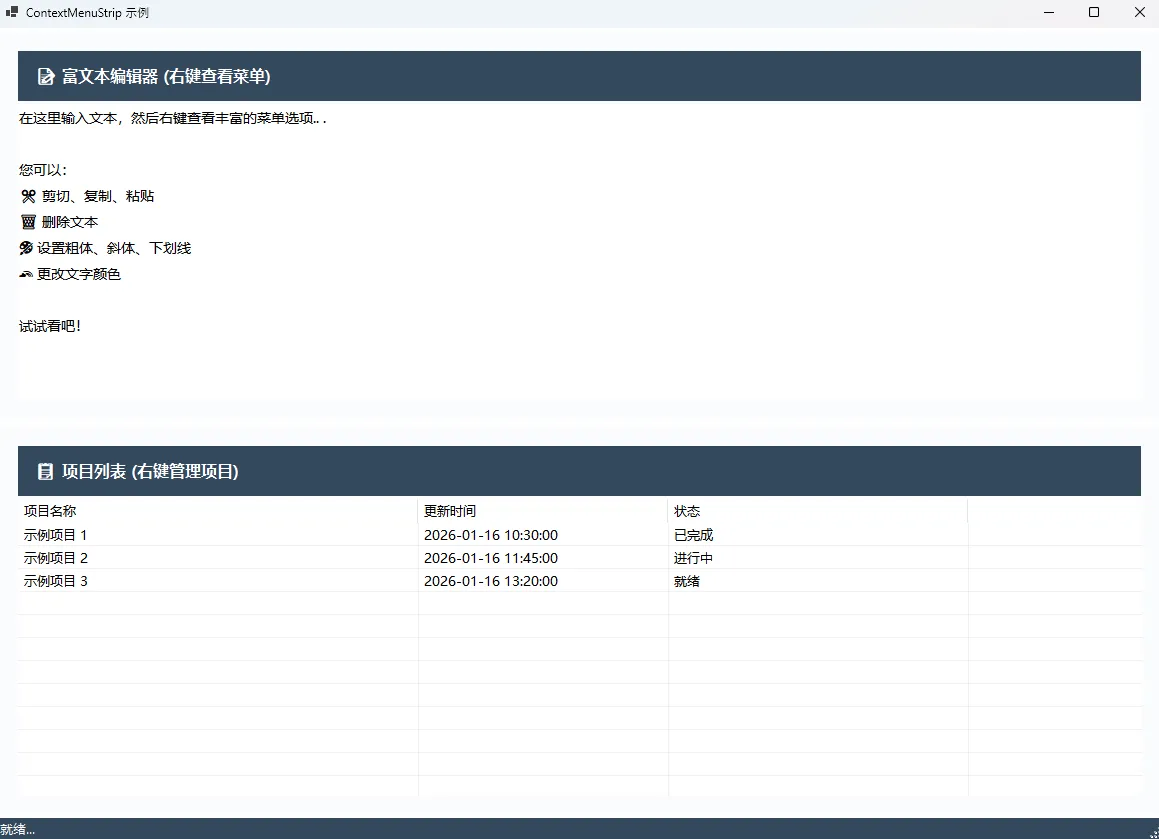
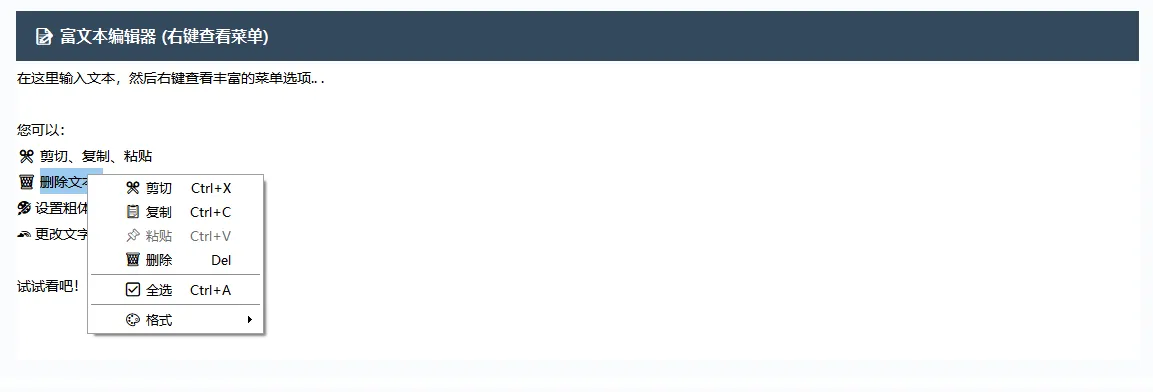
经过多年实战摸爬滚打,我总结出了一套"渐进式"的最佳实践。咱们从基础到进阶,一步步来:
先看运行结果